The Autonomous Vehicle Tennis Ball Collector (AVTBC) was a semester
impractical but fun group project during the Covid-19 lockdown
involving Kyle Keislar, Nolan Mirras, Igor Vdovchenko, and yours
truly. The goal of this project was to collect and return tennis balls
from a standard tennis court. The project utilizes a variety of
sensory and image processing technologies including ultranosin and
smart vision sensors. The AVTBC consists of a basket and robotic arm
mounted to a small electric car for mobile ball collection and
storage.
This project is summed up into 5 high level systems:
Drivetrain System
Ball Detection System
Ball Acquisition System
Microcontroller Navigation & Control System
Power System
Drivetrain System:
This system uses the osoyoo robotic car with modified battery and
motors. The design decisions that came into play into choosing this
car included power, weight, and mobility. This arduino interfacing
model allowed for easier chassis modification and high torque
performance for the increased weight the basket and tennis balls would
bring.
Ball Detection System:
For this system two main sensors were used. For the long distance
sensor network a mesh of ultrasonic sensors were used as they were
cheap, lightweight, and had a detection radius of greater than 10
inches. For the shorter distances a Pixy2 Smart Vision Sensor was able
to do the trick. This lightweight and compact smart sensor is capable
of tracking multiple objects, has integrated arduino capability, and
specializes in color detection.
Ball Acquisition System:
This system includes an acquisition and storage device. A robotic arm
called Lewan Soul xArm, dubbed Armen, was used to pick up the tennis
balls while a simple, cheap, and lightweight basket was screwed for
the ball collection. The biggest weight for the car would be the
robotic arm so the main considerations when picking armen was size,
weight, power, and range of motion. Armen met the requirements and
included a board that supplied the power and data the servos required.
Armen utilizes TTL on the TX and RX pins and a proprietary protocol
for communication between the arduino and arm.
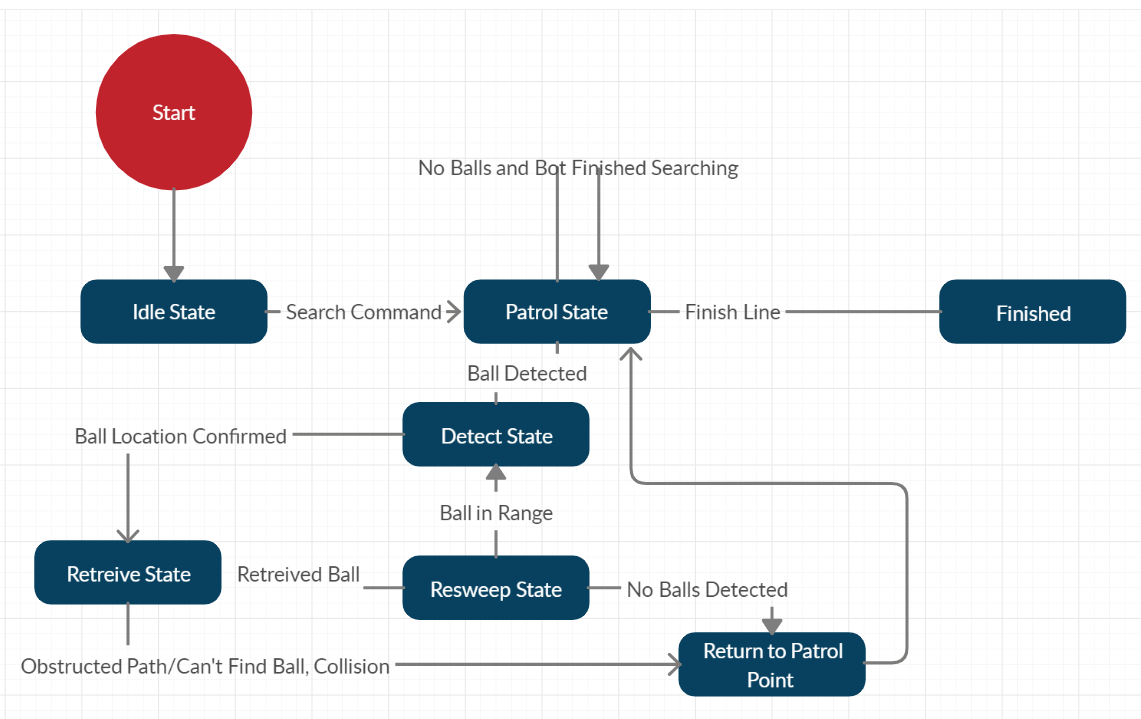
Microcontroller Navigation & Control System:
The navigation and control system was based on a routine state diagram
given below. When placed on the tennis court the robot will patrol in
a straight line. Once the object is detected the pixy camera will
confirm if it is a tennis ball. Once in position the arm will go
through its retrieval subroutine and place it on the basket. The car
will then return to the previous patrol point and resume patrol.
AVTBC State Diagram Power System:
The power system must be able to power the car’s motors, Armen’s
servos, and arduino with the sensors. They will also need to have the
capacity to continuously operate for one court sweep. Using two LiPo
high discharge 3.8V rechargeable batteries the costs were able to stay
inexpensive. However, the operational time will put a significant
drain on the 2.2 A/hr battery pack. Another battery pack is being
considered as well as adding mosfet switches with the logic control
coming from the arduino.